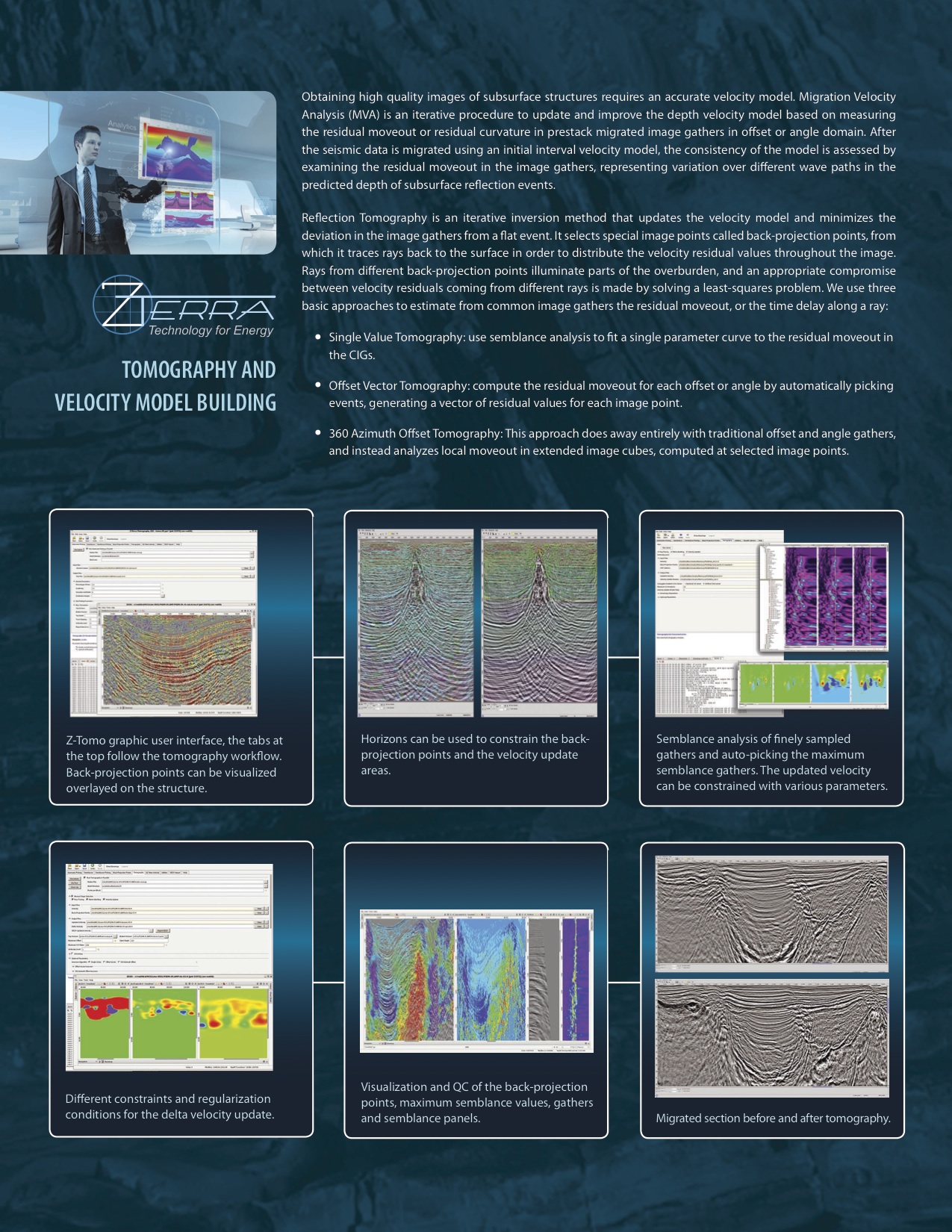
| High quality imaging of subsurface structures requires an accurate velocity model. Migration Velocity Analysis (MVA) improves the velocity model associated with a survey in order to create an accurate image of subsurface structures. After seismic data has been migrated through its current interval velocity model, the consistency of the model with the data is assessed by examination of the moveout in the common image gathers (CIGs), which represents variation over different wave paths in the predicted depth of subsurface reflection events.
Z-Tomo produces high quality velocity models while dramatically reducing the time required for each iteration of tomography. It also supports a wide range of velocity model building options and workflows:
|
 |
Reflection Tomography is an iterative inversion method that updates the velocity model and minimizes the deviation in the common image gathers from a flat event. It selects special image points called back-projection points, from which it traces rays back to the surface in order to distribute the velocity residual values throughout the image. Rays from different back-projection points illuminate parts of the overburden, and an appropriate compromise between velocity residuals coming from different rays is made by solving a least-squares problem. We use three basic approaches to estimate from common image gathers the residual moveout, or the time delay along a ray:
Z-Tomo is fully integrated with Z-Terra’s time and depth imaging algorithms. This allows the user to produce superior results in a wide range of geologic settings. |
|
|
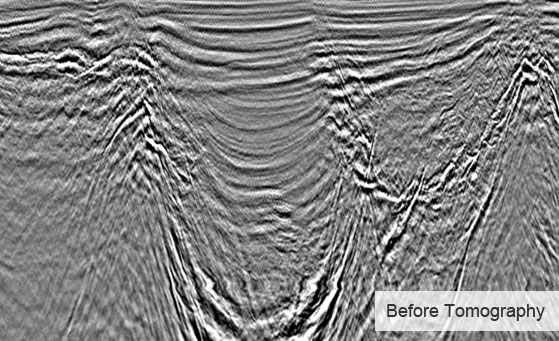
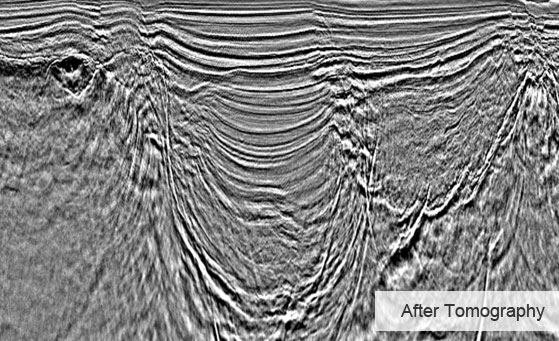
Before and After Z-Tomo Tomography
With its revolutionary tomography and depth velocity model building, Z-Tomo should be an essential component of your workflow.
- Grid based tomography
- Horizon-constrained velocity updates
- VTI and TTI velocity updates
- Single and multiple parameter residual velocity estimation:
- Single Value Tomography
- Offset Vector Tomography
- 360 Azimuth Offset Tomography
- Wide azimuth back-projection updates
- 3D-360 degree Extended Gathers
- Layer freezing or global updates
- Multiscale regularization tomography
- User defined selection of wide azimuth update geometry
- Model preconditioning
- Input offset, extended gathers generated by Kirchhoff PSDM of Fast Beam Migration, or angle gathers
- Automatic residual velocity picking
- Horizon and fault picking and visualization
- Topographic updates
- Automatically generated back-projection points
- Top and base of salt horizon picking
- Salt body insertion
- Salt flood model generation
- Build complex overthrust and fault shadow velocity models
- Global and local error visualization and QC
- Residual error back-projection QC tools
- Residual error smoothing along horizons
- Ray coverage visualization and QC
- Azimuth coverage visualization and QC
- Checkpoint restart
- Job monitoring
- Nodes addition or removal during runtime
The processing and visualization software is designed for rapid and accurate quality control and turnaround of the velocity update iterations.
- 64-bit, for x64-86 architecture processors (also known as x64, x64_86, AMD64, EMT64T, Intel 64)
- Red Hat® Enterprise Linux® (or compatible) 4.8 and above, 5.3 and above, 6.0 and above